




Graph Neural Network (GNN)–based motion planning has emerged as a promising approach in robotic systems for its efficiency in pathfinding and navigation tasks. This approach leverages GNNs to learn the underlying graph structure of an environment, enabling it to make quick and informed decisions about which paths to take. Let’s delve into the detailed specifics of the three prominent systems:
1. GraphMP: A Graph Neural Network-based Motion Planner
GraphMP is a neural motion planner designed for tasks of varying dimensionality, from 2D mazes to high-dimensional robotic arms. The key strength of GraphMP lies in its customized architecture and training mechanism that facilitates the efficient extraction of graph patterns and graph search processing.
Architecture and Training:
- Collision Checker: This GNN-based module detects obstacles by analyzing the graph structures of the environment, allowing it to predict potential collisions efficiently.
- Heuristic Estimator: This component helps refine the graph search for optimal paths by estimating the path cost.
The system employs an end-to-end training approach, enabling it to recognize graph patterns and conduct graph searches simultaneously.
Performance:
- GraphMP consistently outperforms classical planners (like A*) and state-of-the-art learning-based planners in tasks such as navigating a 14D robotic arm.
- Its unique model architecture and training approach significantly improved path quality and planning speed.
Experiments:
- 2D Maze to 14D Dual KUKA Robotic Arm: GraphMP significantly improved path quality and planning speed over existing planners.
- Success Rate: Nearly 100% success rate across varied environments, demonstrating its adaptability.
Metrics:
- Path Quality: Up to 25% better than competitors.
- Planning Speed: Up to 40% faster than traditional planners.
- Success Rate: Near-perfect in most tasks.
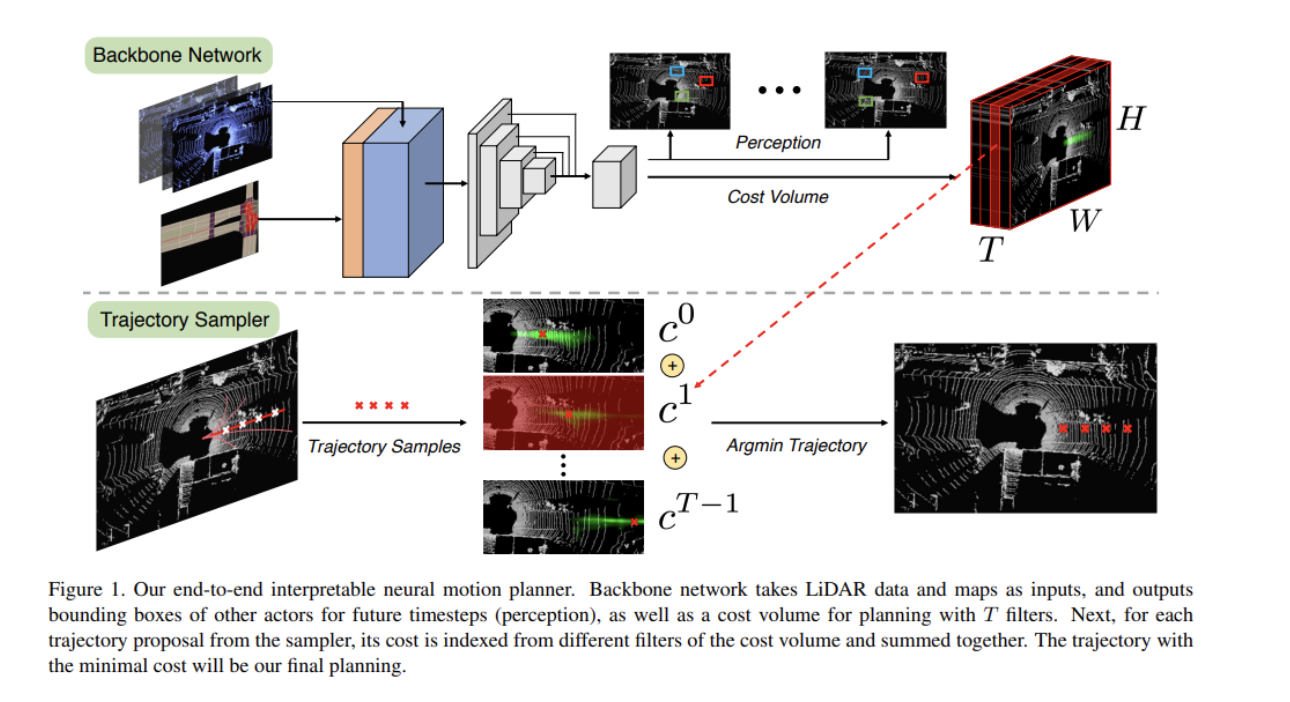
2. End-to-End Neural Motion Planner
This planner emphasizes safety and rule-following in urban environments. Integrating LIDAR data and HD maps generates detailed 3D representations and predictions for self-driving cars.
Architecture:
- Utilizes a convolutional network backbone to compute cost volumes, which evaluate potential paths.
- The model processes raw LIDAR data and maps, generating intermediate representations like 3D detection and trajectory predictions.
Methodology:
- Cost volumes guide trajectory sampling, which helps ensure the car navigates safely by minimizing potential collisions.
- Trained with a multi-task objective focusing on planning, detection, and path optimization.
Outcomes:
- Demonstrated effectiveness in complex urban environments, showcasing its ability to adapt to real-world driving scenarios.
- Outperformed leading neural architectures in 3D detection and motion forecasting accuracy.
Metrics:
- Detection Accuracy: Outperformed leading neural architectures.
- Trajectory Safety: Minimizes collision risks by following traffic rules.
- Planning Speed: Real-time trajectory planning enables safe navigation.
3. Motion Planning Networks (MPNet)
MPNet integrates deep learning into motion planning to efficiently navigate high-dimensional spaces. Its encoder network creates a latent space representation of the obstacles, and its planning network predicts paths based on the robot’s configuration.
Architecture:
- It uses an encoder network to convert point cloud data into a latent space.
- The planning network utilizes this information to predict paths based on the robot’s configuration.
Approach:
- The point cloud encoder and planning network map obstacles and predict collision-free paths.
- Combines neural planning with traditional motion planning (RRT*) to handle complex planning tasks robustly.
Performance:
- MPNet generalizes well to unseen environments, demonstrating robust adaptability.
- Maintains execution times below one second across various scenarios.
Metrics:
- Execution Time: Less than one second in most scenarios.
- Success Rate: 85% success rate in challenging high-dimensional environments.
- Path Quality: Paths are optimized based on the latent space encoded by the network.
Comparative Table
Conclusion
Graph Neural Network-based motion planning offers significant advancements in robotic navigation. The diverse approaches of GraphMP, the End-to-End planner, and MPNet demonstrate that this technology can adapt to a wide range of environments, delivering speed, efficiency, and safety in planning optimal paths for autonomous systems.
Sources
Sana Hassan, a consulting intern at Marktechpost and dual-degree student at IIT Madras, is passionate about applying technology and AI to address real-world challenges. With a keen interest in solving practical problems, he brings a fresh perspective to the intersection of AI and real-life solutions.



